التحكم بالروبوت عن طريق الأفكار فقط شاهده وهو يعمل
طور الباحثون روبوت يأخد إشاراته من موجات الدماغ البشري، ويغير تصرفاته بشكل فوري تقريباً إذا لاحظ أن الشخص يرتكب خطأً ما.
تراقب الروبوتات نشاط المخ لإشارات محددة باستخدام خوارزميات جديدة ، يمكن للتكنولوجيا أن تمهّد الطريق للمستقبل حيث يمكن للبشر السيطرة على الروبوتات ببساطة تقريباً عن طريق مراقبة أعمالهم.
يقول مدير معهد ماساتشوستس لعلوم الحاسوب و مختبر الذكاء الاصطناعي (CSAIL)، دانييلا روس:«تخيل قدرتك على أن تأمر الروبوت بالقيام بعمل معين، دون الحاجة لكتابة الأوامر ،الضغط على زر، أو حتى قول كلمة واحدة».
يمكن لنهج اِنْسِيَابِيّ مثل هذا أن يحسّن من قدرتنا على الإشراف على روبوتات المصانع او السيارات بدون سائق، وغيرها من التكنولوجيا التى لم نخترعها حتى الآن، في حال حرَّرَنا المساعدين الإفتراضيين مثل برنامج سيري الخاص بشركة أبل( Apple’s Siri) و اليكسا الخاص بأمازون (Amazon’s Alexa) من الأزرار والعتلات وجعلنا التكنولوجيا تتحكم بواقعنا، لكن الحقيقة هي أن هذه الأنظمة لا تزال محدودة إلى حد ما.
ليس فقط كون نظام التعرف على الصوت غير مكتمل في بعض الأحيان، ولكن تم تصميم البرمجيات للرد فقط على كلمات وعبارات معينة، وهو ما يعني احتياج المستخدمون إلى تعلم الحديث بطرق معينة ليجذب انتباه الأنظمة.
تجاوزت واجهات التحكم عن طريق الدماغ الحالية التي تسمح للناس التحكم مباشرة بالروبوتات من خلال أفكارهم بعض القضايا التى تقيد التَعَرُّف الصوتي ، ولكن لا يزال المستخدمون ملزمون بتدريب أنفسهم على التفكير بطريقة خاصة جدا لجعل الآلات تفعل ما يريدون.
يستغرق هذا النوع من التدريب وقتاً طويلاً لإتقانه، وحتى عندما تحصل على طريقة تعليق منه، فإن إجبار نفسك على تكييف تفكيرك إلى عدد من الأفكار المعينة القائمة على التحكم يمكن أن يكون مرهق ذهنياً.
لتفادي هذا، صمم الباحثون (CSAIL) نظام يقوم على ما يسمى (الجهود المتعلقة بالخطأ) (ErrPs) – إشارات المخ التي تُوَلَّد كلما لاحظنا خطأ، والتي يتم إنتاجها بسهولة دون الحاجة إلى أي تركيز جدي.
ويقول روس :« كل ما عليك القيام به – وأنت تشاهد الروبوت- هو الاتفاق أو الاختلاف عقليا مع ما يقوم به.
ولا يجب عليك تدريب نفسك على التفكير بطريقة معينة – فالآلة تتكيف معك، وليس العكس».
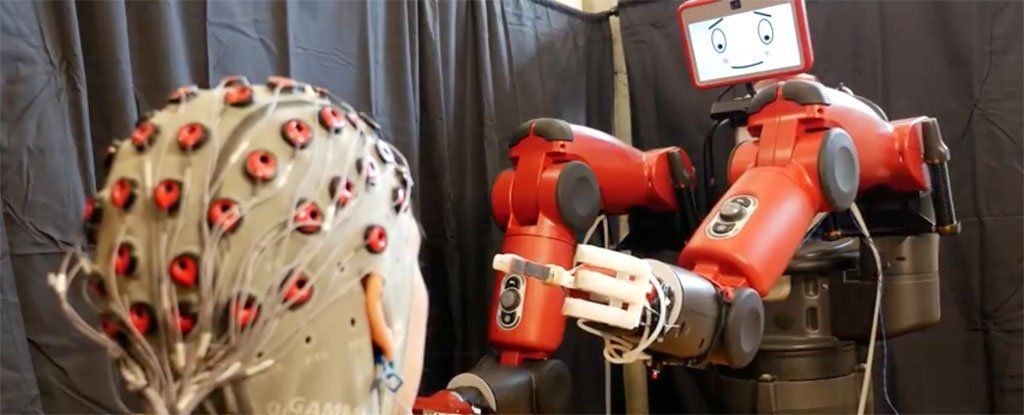
جرب الباحثون نظامهم باستخدام روبوت صناعي يدعى باكستر. لكى يكون الروبوت قادراً على التقاط الجهود المتعلقة بالخطأ، يحتاج أحد المشاركين البشر إلى ارتداء غطاء كهربية (EEG) تراقب نشاط المخ.
في التجربة، قام باكستر بتمارين صواب / خطأ بسيطة، مثل مهمة تصنيف الأشياء، وضع علب رش الطلاء في علبة واحدة، ووضع بكرات من الأسلاك في علبة أخرى.
باستخدام خوارزميات جديدة وضعت من قبل الفريق لتصنيف الجهود المتعلقة بالخطأ ، كان الروبوت قادراً على التقاط إشارات المخ من المتطوعين في امتداد 10-30 ميلي في الثانية فقط.
وهذا يعني أنه إذا لاحظ الإنسان باكستر يقوم بخطأ من خلال وضع جسم في الصندوق غير المخصص، يمكن للروبوت تصحيح الخطأ على الفور تقريباً.
في الاختبار، كان النظام قادرا ًعلى كشف ErrPs في 70 في المئة من الحالات، حيث لاحظ المشارك البشري أن الروبوت يرتكب خطأ.
لم يتم إعادة النظر فى البحث حتى الآن من قبل علماء آخرين، ولكن الفريق يأمل في نهاية المطاف لتحسين معدل الدقة لأكثر من 90 في المئة – وانشاء نظام النسخ الاحتياطي حيث يمكن للروبوت أن يطلب من الإنسان الاستجابة إذا كان غير متأكد من الكشف عن ErrP.
كما أنهم يعملون على نسخة (عالمية) للنظام – في الوقت الراهن، ولا بد من إدراجها لكل مستخدم للبرمجيات – ويهدفون إلى صقل حساسية الكشف عن ErrP، بحيث يمكن للروبوتات الكشف عن مجموعة ردود مختلفة بعض الشيء من مراقب بشري، وليس فقط مجرد ردود صحيحة أو خاطئة.
يعتقد الباحثون أنه يمكنك المساعدة في السيطرة على المركبات ذاتية القيادة بواسطة هذا الاكتشاف، حيث تمر أفكار الركاب فى الرحلة كرد فعل آني لنظام قيادة ذاتي.
لا يزال تطبيق هذا النظام يبدو بعيدا، إلا أنه ممكن في المستقبل القريب.
وقال روس مات رينولدز في نيو ساينتست:«إننا نخطو ببطئ بالعمل على وجود آلات تتعلم منّا، وتتكيف مع ما نفكر به.
سيكون من الرائع في المستقبل أن يعمل البشر والروبوتات معاً على تنفيذ شروط الإنسان.
ومن المقرر أن يتم عرض النتائج في المؤتمر الدولي IEEE للروبوتات والأتمتة في سنغافورة في شهرمايو».
ترجمة:ساره جمال
تدقيق: أسمى شعبان
المصدر